





















ကျေးဇူးပြု၍ သူမကို နှိပ်ပါ ဗီဒီယိုကြည့်ရန်-
https://www.youtube.com/shorts/9aEUcIyW3cU
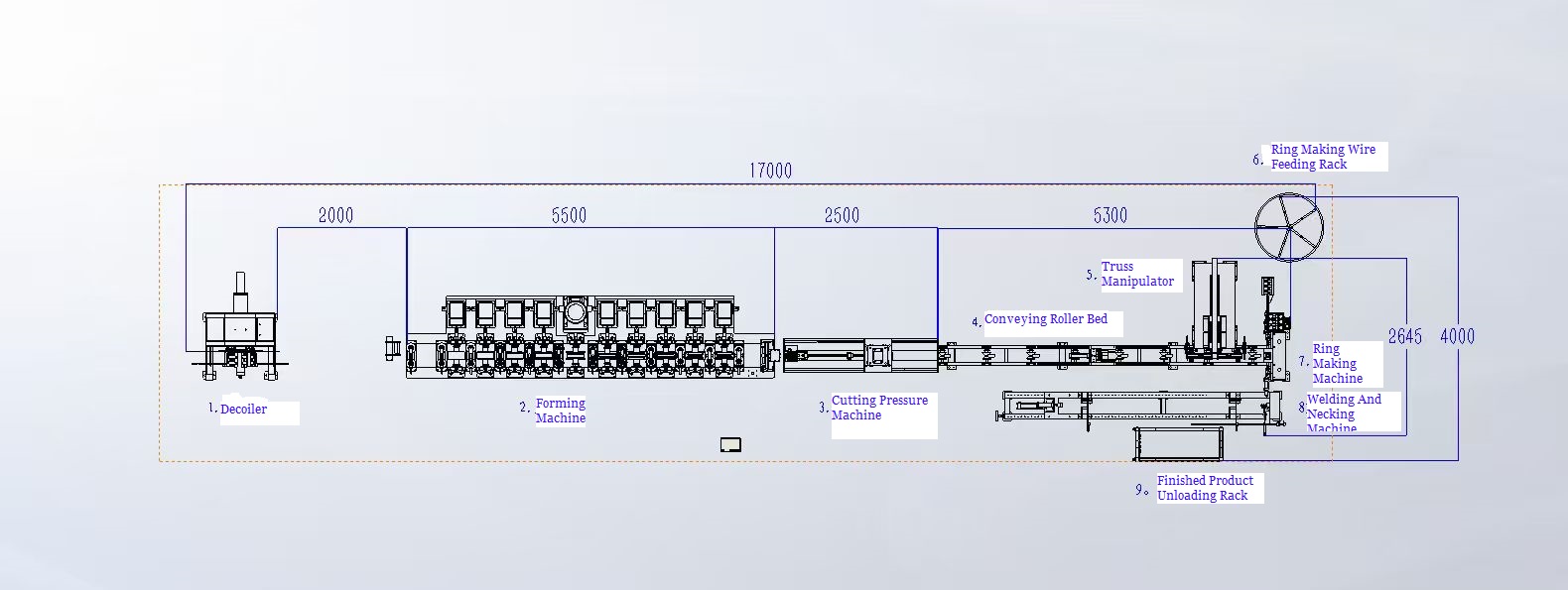
အလုပ်စီးဆင်းမှု-
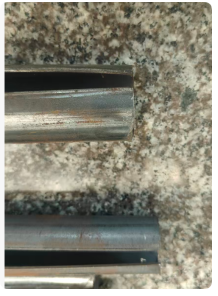
ပန်းကန်ပြားအမျိုးအစား:
ပစ္စည်းအထူ (နံရံအထူ): 2.3-3.0 မီလီမီတာ၊ အဖြစ်များသောအထူ: 2.7 မီလီမီတာ


ပစ္စည်း:
စက်အစိတ်အပိုင်းများ
| စီးရီးနံပါတ် | ထုတ်ကုန်အမည် | ယူနစ် | အရေအတွက် | မှတ်ချက်များ |
|---|---|---|---|---|
| ၁ | ဒယ်ကိုလ်ယာ | သတ်မှတ်ပါ | ၁ | ၃ တန် ဟိုက်ဒရောလစ် decoiler |
| ၂ | အဓိကစက်ဖွဲ့စည်းခြင်း | သတ်မှတ်ပါ | ၁ | လျှော့ချရေး၊ ဂီယာဘောက်စ်၊ လမ်းညွှန်ယန္တရား၊ အအေးလိပ်ဖွဲ့စည်းသည့်ယန္တရား အပါအဝင် |
| ၃ | ဖြတ်တောက်သည့်ကိရိယာ | သတ်မှတ်ပါ | ၁ | ဖြတ်တောက်ခြင်း၊ ጭማቾችချခြင်း၊ လည်ပင်းညှိခြင်းလုပ်ဆောင်ချက်များ၊ ရေတွက်ခြင်းလုပ်ဆောင်ချက်၊ ကျောက်ဆူးတံချိန်ညှိခလုတ် အပါအဝင် |
| ၄ | အစာကျွေးသည့်ကိရိယာ | သတ်မှတ်ပါ | ၂ | ပါဝါသုံး ကျွေးစက်တစ်လုံး၊ ပါဝါမသုံးသော ကျွေးစက်တစ်လုံး၊ ကျွေးမွေးမှုအမြန်နှုန်းကို ချိန်ညှိနိုင်သည် |
| ၅ | ကျောက်ဆူးတံစုဆောင်းသည့် ဟော့ပါ | သတ်မှတ်ပါ | ၁ | ပိုနေသော ဖြတ်တောက်ထားသော ကျောက်ဆူးတံများ ထည့်ရန်အတွက် |
| ၆ | ဟိုက်ဒရောလစ်ဘူတာရုံစနစ် | သတ်မှတ်ပါ | ၁ | 7.5kw မော်တာနှင့် 25MPa ပလပ်စုပ်စက် တပ်ဆင်ထားသည် |
| ၇ | PLC ထိန်းချုပ်မှုစနစ် | သတ်မှတ်ပါ | ၁ |
PLC၊ ထိတွေ့မျက်နှာပြင်၊ ကြိမ်နှုန်းပြောင်းစက်နှင့် အခြားလျှပ်စစ်အစိတ်အပိုင်းများဖြင့် ဖွဲ့စည်းထားပြီး အစိတ်အပိုင်းအားလုံးကို Codesys ပလက်ဖောင်းတွင် တပ်ဆင်နိုင်သည်။
|
| ၈ | Gantry Truss Robot Arm (လက်နှစ်ဖက်) | သတ်မှတ်ပါ | ၁ | Robot Arm 1 သည် feeder မှ anchor rod များကို တိကျစွာ ဖမ်းယူပြီး ring တပ်ဆင်သည့် workbench ၏ သီးသန့်နေရာတွင် ထားရှိသည်။ ring တပ်ဆင်ပြီးနောက် Robot Arm 2 သည် တပ်ဆင်ထားသော ring များပါရှိသော anchor rod များကို ဖမ်းယူပြီး Welding Station 1 နှင့် 2 တွင် အသီးသီး ထားရှိသည်။ Robot arm တစ်ခုစီသည် ချိန်ညှိနိုင်သော အမြန်နှုန်းနှင့် ဘယ်၊ ညာ၊ အပေါ်နှင့်အောက် ဦးတည်ချက်များတွင် ရွေ့လျားနိုင်သော အကွာအဝေးဖြင့် ရှေ့နောက် လွတ်လပ်စွာ လုပ်ဆောင်သည်။ |
| ၉ | လက်စွပ်တပ်ဆင်ခြင်းလုပ်ငန်းခွင် | သတ်မှတ်ပါ | ၁ | ၁.၅-၃ မီတာအရှည်ရှိသော ကျောက်ဆူးတံများ ထားရှိရန်အတွက် သက်ဆိုင်သည့် လက်စွပ်တပ်ဆင်သည့် အထောက်အပံ့နှင့် လေဆလင်ဒါတို့ဖြင့် ဖွဲ့စည်းထားသည် |
| ၁၀ | ဟိုက်ဒရောလစ်လက်စွပ်ပြုလုပ်စက် | သတ်မှတ်ပါ | ၁ | φ8mm သံမဏိဝါယာကြိုးကွင်းများ ပြုလုပ်နိုင်စွမ်းရှိသည်။ လက်စွပ်ပြုလုပ်ရန်အတွက် သံမဏိဝါယာကြိုးသည် အချင်း ၀.၀၂ မီလီမီတာ (၂ မီလီမီတာ) အောက်ရှိ အအေးဆွဲဝါယာကြိုး (ပြီးပြည့်စုံသောစက်ဝိုင်း) ဖြစ်ရမည်။ |
| ၁၁ | လက်စွပ်လုပ်စက်မှိုများ | သတ်မှတ်ပါ | ၆ |
၈ မီလီမီတာ ဝါယာကြိုးအချင်းအတွက် မှိုများ၊ သတ်မှတ်ချက်များမှာ အောက်ပါအတိုင်းဖြစ်သည်။
|
| ၁၂ | လက်စွပ်ဂဟေဆက်စက် | သတ်မှတ်ပါ | ၁ | Station A နှင့် Station B ပါရှိသော အလိုအလျောက် လက်စွပ်ဂဟေဆော်စက် |
| ၁၃ | ပြီးစီးသော ထုတ်ကုန်စုဆောင်းသည့် အိတ် | သတ်မှတ်ပါ | ၁ | ပြီးစီးသွားသော ကျောက်ဆူးတံများ တပ်ဆင်ရန်အတွက် |
| ၁၄ | ဖွဲ့စည်းသည့် အဓိကစက်၏ အမြန်ပြောင်းလဲနိုင်သော Chuck | သတ်မှတ်ပါ | ၅ |
၃၉ မီလီမီတာ၊ ၄၀ မီလီမီတာ၊ ၄၃ မီလီမီတာ၊ ၄၄ မီလီမီတာ၊ ၄၇ မီလီမီတာ နှင့် ၄၈ မီလီမီတာ ပရိုဖိုင်များအတွက် လိပ်ပုံသွင်းမှိုများ အပါအဝင်၊ စုစုပေါင်း ချပ်အမျိုးအစား ၆ မျိုး။
|
အဓိက နည်းပညာဆိုင်ရာ လိုအပ်ချက်များ
ဤစက်သည် အချင်း ၃၉ မီလီမီတာ၊ ၄၀ မီလီမီတာ၊ ၄၃ မီလီမီတာ၊ ၄၄ မီလီမီတာ၊ ၄၇ မီလီမီတာ နှင့် ၄၈ မီလီမီတာရှိသော သတ်မှတ်ချက်ခြောက်မျိုးဖြင့် ခွဲ၍ တပ်ဆင်ထားသော ကျောက်ဆူးဘော့များကို ထုတ်လုပ်နိုင်ပြီး ၈ နာရီအတွင်း အပြီးသတ် ကျောက်ဆူးဘော့ ၂၅၀၀ ခန့် ထုတ်လုပ်နိုင်သည်။
အလိုအလျောက် ကျောက်ဆူးခေါင်းတုံး ပေါင်းစပ်စက်သည် ကျောက်ဆူးခေါင်းတုံး ပုံသွင်းခြင်း၊ လည်ပင်းတပ်ခြင်း၊ လက်စွပ်ပြုလုပ်ခြင်း၊ ဖြတ်တောက်ခြင်းနှင့် ဂဟေဆက်ခြင်းတို့ကို ပေါင်းစပ်ထားသော အလိုအလျောက်ထုတ်လုပ်မှုစက်ကိရိယာတစ်ခုဖြစ်သည်။ ၎င်းတွင် အလိုအလျောက်လုပ်ဆောင်နိုင်မှုမြင့်မားခြင်း၊ ရိုးရှင်းသောလည်ပတ်မှုနှင့် မြင့်မားသောထုတ်လုပ်မှုထိရောက်မှုတို့ ပါရှိသည်။ ၎င်း၏စွမ်းဆောင်ရည်နှင့် ထွက်ရှိမှုမှာ လက်ရှိထုတ်လုပ်မှုလိုင်းအဆင့်ထက် သာလွန်ကောင်းမွန်ပြီး ယူနစ်တစ်ခုစီသည် ယုံကြည်စိတ်ချစွာလည်ပတ်ပြီး ပျက်ကွက်မှုနှုန်းနည်းပါးသည်။ 550MPa ထက်ပိုသော ဆွဲဆန့်အားရှိသော အအေးခံသံမဏိကို အသုံးပြုသောအခါ အများဆုံးထွက်ရှိမှုမှာ
တစ်မိနစ်လျှင် ၄.၅ ± ၁ ခု
MF39/40/43/47/48×1800-2400mm သတ်မှတ်ချက်ဖြင့် MT 285-1992 စံနှုန်းနှင့် ကိုက်ညီသော split set anchor bolt များဖြစ်ပြီး အရှည်ကို ချိန်ညှိနိုင်သည်။
ထုတ်လုပ်မှုလိုင်းတွင် အောက်ပါတို့ပါဝင်သည်- ၃ တန် ဟိုက်ဒရောလစ် decoiler → anchor bolt forming machine → counter, necking and cutting unit → feeder → gantry truss robot arm → ring assembling workbench → ring making machine → ring welding machine → main control cabinet → hydraulic components → finish product collection hopper။
သံမဏိအစင်းသည် ပုံသွင်းစက်ထဲသို့ဝင်ရောက်ပြီး ဆယ်ကြိမ်တိုင်တိုင်လိပ်၍ ပုံသွင်းပြီး အချင်း ၃၉ မီလီမီတာ၊ ၄၀ မီလီမီတာ၊ ၄၃ မီလီမီတာ၊ ၄၄ မီလီမီတာ၊ ၄၇ မီလီမီတာနှင့် ၄၈ မီလီမီတာ အသီးသီးရှိသော သတ်မှတ်ချက်ခြောက်ခုဖြင့် ကျောက်ဆူးဘော့ကိုယ်ထည်များကို ထုတ်လုပ်သည်။ ကျောက်ဆူးဘော့၏ အဓိကရိုးတံသည် အချင်း ၇၀ မီလီမီတာရှိပြီး ဘယ်နှင့်ညာချည်မျှင်ဒီဇိုင်းကို အသုံးပြုသည်။ ရိုလာ၏ နှစ်ဖက်စလုံးတွင် ရိုလာလျော့မသွားစေရန် double lock nuts နှင့် lock washers များ တပ်ဆင်ထားသည်။ 15kw three-phase asynchronous motor ဖြင့် မောင်းနှင်ပြီး reducer ဖြင့် နှေးကွေးစေပြီးနောက် ပါဝါကို ပါဝါဖြန့်ဖြူးရေးသေတ္တာမှတစ်ဆင့် ပုံသွင်းရိုးတံတစ်ခုစီသို့ ပို့ဆောင်ပေးသောကြောင့် ပုံသွင်းရိုးတံတစ်ခုစီ၏ မျှတသောပါဝါနှင့် synchronous speed ကို သေချာစေသည်။ စတင်ခြင်းနှင့် ရပ်တန့်ခြင်းအတွက် ကြိုးမဲ့အဝေးထိန်းခလုတ် ရရှိနိုင်ပါသည်။
ဖြတ်တောက်ခြင်းနည်းလမ်းမှာ ဟိုက်ဒရောလစ်ခြေရာခံဖြတ်တောက်ခြင်းဖြစ်သည်။ ခြေရာခံလှည်းကို frame ၏ linear guide rail တွင်တပ်ဆင်ထားပြီး hydraulic cutting နှင့် necking device ကို trolley ပေါ်တွင်တပ်ဆင်ထားသည်။ counter သည် ဖြတ်တောက်ခြင်း device သို့ ညွှန်ကြားချက်များပေးပို့ပြီး anchor bolt သည် trolley ကို linear guide rail တစ်လျှောက် ရှေ့သို့လျှောကျစေရန်တွန်းပြီး cutting die သည် bolt body ကို ဖြတ်တောက်ရန်နှင့် neck ပြုလုပ်ရန် ညွှန်ကြားချက်များအတိုင်း သတ်မှတ်ထားသောအရှည်သို့ ခြေရာခံသည်။ servo motor သည် ball screw ကို မောင်းနှင်ပြီး trolley ကို မူလနေရာသို့ပြန်ပို့ကာ ဖြတ်တောက်ထားသောနှင့် necked bolt body များသည် feeder trough ထဲသို့လှိမ့်ဝင်ပြီး feeder သည် bolt body များကို feeder ၏ reserved position သို့ အလိုအလျောက်လမ်းညွှန်ပေးသည်။
feeder ၏ သီးသန့်နေရာမှ ထုတ်လွှင့်သော bolt body ၏ in-place signal ကို လက်ခံရရှိသည်နှင့်၊ gantry truss robot arm ၏ Gripper 1 သည် bolt body ကို ဆုပ်ကိုင်ပြီး ring assembling station သို့ ပို့ဆောင်ပေးသည်၊ ထို့ကြောင့် bolt body ၏ slit direction သည် ရွေ့လျားနေစဉ်အတွင်း မပြောင်းလဲဘဲ ရှိနေစေရန် သေချာစေသည်။ ၎င်းသည် bolt body များကို ထပ်ခါတလဲလဲ သယ်ယူပို့ဆောင်ရန် ရှေ့တိုးနောက်ငင် လုပ်ဆောင်ပြီး အမြန်နှုန်းနှင့် သယ်ယူပို့ဆောင်ရေးအကွာအဝေးကို ချိန်ညှိနိုင်သည်။
လက်စွပ်ပြုလုပ်စက်မှ ပေးပို့သော ပြီးစီးမှုအချက်ပြမှုကို လက်ခံရရှိသည်နှင့်၊ gantry truss robot arm ၏ Gripper 2 သည် bolt body ကို ဆုပ်ကိုင်ပြီး ring welding machine ၏ Welding Station A နှင့် B သို့ ပို့ဆောင်ပေးသည်၊ ထို့ကြောင့် bolt body ၏ slit direction သည် ရွေ့လျားနေစဉ်အတွင်း မပြောင်းလဲဘဲ ရှိနေစေရန် သေချာစေသည်။ ၎င်းသည် bolt body များကို အထပ်ထပ်သယ်ယူပို့ဆောင်ရန် ရှေ့တိုးနောက်ငင် လုပ်ဆောင်ပြီး အမြန်နှုန်းနှင့် သယ်ယူပို့ဆောင်ရေးအကွာအဝေးကို ချိန်ညှိနိုင်သည်။
လက်စွပ်တပ်ဆင်ခြင်းလုပ်ငန်းခွင်
Robot Arm 1 မှ ပေးပို့သော ဘို့ကိုယ်ထည်ကို လက်ခံရရှိသည်နှင့်၊ လေဆလင်ဒါသည် ၎င်းကို လျင်မြန်စွာ ကွင်းတပ်ဆင်ရန်အတွက် လက်စွပ်ပြုလုပ်သည့်စက်၏ သီးသန့်အနေအထားသို့ တွန်းပို့သည်။
ဝါယာကြိုးကျွေးစင်
:
၈ မီလီမီတာ အချင်းရှိသော အအေးဆွဲဝါယာကြိုးတစ်စည်းလုံး (ပစ္စည်း- Q195၊ လုံးဝန်းမှုအမှားအယွင်း ၀.၀၂ မီလီမီတာအတွင်း) ကို ဝါယာကြိုးကျွေးသည့်ရီးလ်စင်ပေါ်တွင် တပ်ဆင်ထားပြီး အအေးဆွဲဝါယာကြိုးကို လက်ဖြင့်ဆွဲထုတ်ကာ လက်စွပ်ထုတ်လုပ်သည့်စက်၏ အစာကျွေးရိုလာထဲသို့ ထည့်သွင်းသည်။
ဟိုက်ဒရောလစ်လက်စွပ်ပြုလုပ်စက်
:
ဝါယာကြိုးကျွေးစက်၊ servo feeder နှင့် hydraulic ဖြတ်တောက်ခြင်းနှင့် ပုံသွင်းစက်တို့ဖြင့် ဖွဲ့စည်းထားသည်။ ဤအစိတ်အပိုင်းသည် ကုန်ကြမ်းကွိုင်ကို ဖြောင့်စေပြီး ပုံသေအရှည်သို့ ဖြတ်တောက်ကာ သံမဏိဘားကို anchor bolt ၏ သင့်လျော်သောနေရာသို့ လျော့မသွားဘဲ လှည့်ပေးသည်။ ဤအစိတ်အပိုင်း၏ ဖြတ်တောက်ခြင်းနှင့် ကွင်းခတ်ခြင်းကို hydraulic oil cylinder များဖြင့် ထိန်းချုပ်ထားပြီး၊ ကျွေးမွေးခြင်းအရှည်နှင့် ကွင်းခတ်ခြင်း parameter များကို PLC မှ ထိန်းချုပ်ထားပြီး၊ parameter များကို touch screen မှတစ်ဆင့် ချိန်ညှိနိုင်သည်။
လက်စွပ်ဂဟေဆက်စက်
CO2 ဂဟေစက်နှစ်ခုဖြင့် ဖွဲ့စည်းထားပြီး၊ double-machine နှင့် double-station (Station A နှင့် B) bolt body ring welding workbench တပ်ဆင်ထားသည်။ truss robot arm ၏ Gripper 2 မှ ပေးပို့သော သံမဏိကွင်းပါသည့် bolt body ကို လက်ခံရရှိသည်နှင့်၊ ဂဟေစက်များ (A နှင့် B) သည် အပြည့်အဝချောမွေ့သော ဂဟေဆက်ကြောင်းများနှင့် မြင့်မားသောဂဟေအမြန်နှုန်းဖြင့် မြန်ဆန်သောဂဟေဆော်မှုကို လုပ်ဆောင်သည်။ ring welding စက်၏ လျှပ်စီးကြောင်းနှင့် ဗို့အားကို အဝေးမှ ချိန်ညှိနိုင်သည်။
ပြီးစီးသော ထုတ်ကုန်စုဆောင်းသည့် အိတ်
:
လက်စွပ်ဂဟေစက်သည် ဂဟေဆက်ပြီးသော ကျောက်ဆူးဘော့များကို ချပြီးနောက်၊ ၎င်းတို့သည် အပြီးသတ်ထုတ်ကုန်စုဆောင်းသည့် ဟော့ပါထဲသို့ အလိုအလျောက် လိမ့်သွားသည်။ စက်ပစ္စည်းသည် လူကိုယ်တိုင်ဝင်ရောက်စွက်ဖက်ခြင်းမရှိဘဲ စဉ်ဆက်မပြတ်လည်ပတ်သည်။
ထိန်းချုပ်ရေး ကွန်ဆိုးလ်
:
လုပ်ငန်းစဉ် ၁ မှ ၁၀ အထိ ထိန်းချုပ်ပြီး ကြိုးမဲ့အဝေးထိန်းလုပ်ဆောင်ချက်ကို ပံ့ပိုးပေးသည်။
ဟိုက်ဒရောလစ် ဘူတာရုံ
:
ဟိုက်ဒရောလစ် ဖြတ်တောက်ယူနစ်နှင့် ဟိုက်ဒရောလစ် ကွင်းထုတ်လုပ်စက်မှ အသုံးပြုသည်။
ပစ္စည်းကိရိယာ၏ အဓိက ကန့်သတ်ချက်များနှင့် အဓိကဒေတာများ
၁။ ပစ္စည်းကိရိယာနည်းပညာဆိုင်ရာကန့်သတ်ချက်များ
၁.၁ အလျားလိုက် ရိုးတံ အချင်း: φ၇၀မီလီမီတာ
၁.၂ အောက်ပိုင်း ရှပ်အလယ်ဗဟို အမြင့်: ၁၄၀ မီလီမီတာ
၁.၃ ဒေါင်လိုက်ရိုးတံချိန်ညှိမှုစင်တာအကွာအဝေး: ၁၃၅-၁၆၀ မီလီမီတာ
၁.၄ ရှေ့နှင့်နောက် အလျားလိုက်ရိုးတံများအကြား အကွာအဝေး- ၄၀၀ မီလီမီတာ
၁.၅ ဒေါင်လိုက်လိပ်ရိုးတံအချင်း: φ၂၅မီလီမီတာ
၁.၆ ဒေါင်လိုက်လိပ်နှစ်ခု၏ ချိန်ညှိမှုအပိုင်းအခြား- ၉၀-၁၇၀ မီလီမီတာ
၂။ အဓိကဒေတာ
၂.၁ ဖွဲ့စည်းခြင်းအမြန်နှုန်း: ၄-၁၂ မီတာ/မိနစ်၊ ချိန်ညှိနိုင်သည်
၂.၂ အဓိကလည်ပတ်မော်တာ: ၁၅KW
၂.၃ လျှော့ချစက်: K107
၂.၄ ဟိုက်ဒရောလစ်စုပ်စက်စခန်း၏ မော်တာပါဝါ: 7.5kw
ယူနစ်၏ ၂.၅ လှိမ့်အထူ: Q195-Q355 သံမဏိစရစ်ကွိုင်များအတွက် ၂.၇ မီလီမီတာ
၂.၆ ပုံသေအရှည်: ၁.၈-၂.၄ မီတာ
၂.၇ တစ်မိနစ်လျှင် ကျောက်ဆူးဘို့ ထွက်ရှိမှု: ၄.၅ ခု ±၁
၂.၈ Gantry Truss Robot Arm: ၁ စုံ (၂ ဘူတာ: A, B)
၂.၉ ဟိုက်ဒရောလစ်လက်စွပ်ပြုလုပ်စက် - ၁ စုံ
၂.၁၀ လက်စွပ်ဂဟေဆက်ယူနစ်: ၁ စုံ
| မဟုတ်ပါ | စက်အမည် | ယူနစ် | အရေအတွက် | မှတ်ချက်များ | ပုံများ |
| ၁ |
ဟိုက်ဒရောလစ်တင်းအားကျွေးစက်
|
သတ်မှတ်ပါ | ၁ |
ဟိုက်ဒရောလစ်ဘူတာရုံ အပါအဝင်
|

|
| ၂ |
Anchor Bolt ဖွဲ့စည်းခြင်း အဓိကစက်
|
သတ်မှတ်ပါ
|
၁ |
သတ်မှတ်ချက်အမြန်ပြောင်းလဲနိုင်သော ပြားတစ်စုံ ပါဝင်သည်
|

|
| ၃ |
ဖြတ်တောက်ခြင်းနှင့် လည်ပင်းတပ်ခြင်းယူနစ်
|
သတ်မှတ်ပါ
|
၁ |
ဟိုက်ဒရောလစ်ဘူတာရုံ အပါအဝင်
|

|
| ၄ |
ကျောက်ဆူးတံ သယ်ယူပို့ဆောင်ရေးစင်
|
သတ်မှတ်ပါ
|
၁ |
အရှည် ၃.၅ မီတာ
|

|
| ၅ |
လျှပ်စစ်ဗီရို
|
သတ်မှတ်ပါ
|
၁ |
ထုတ်လုပ်မှုလိုင်းတစ်ခုလုံးအတွက်
|
|
| ၆ |
Gantry Truss Robot Arm
|
သတ်မှတ်ပါ
|
၁ |
ယူနစ်နှစ်ခုပါဝင်သည်- မြှင့်တင်ခြင်းနှင့် သယ်ယူပို့ဆောင်ခြင်း
|

|
| ၇ |
အလိုအလျောက် ဟိုက်ဒရောလစ်လက်စွပ်ပြုလုပ်စက်
|
သတ်မှတ်ပါ
|
၁ |
သတ်မှတ်ချက်မှိုတစ်စုံနှင့် လက်စွပ်တပ်ဆင်သည့် အလုပ်ခုံ ပါဝင်သည်
|

|
| ၈ |
အလိုအလျောက် လက်စွပ်ဂဟေဆက်စက် (နှစ်ထပ်ဂဟေဆက်စက်)
|
သတ်မှတ်ပါ | ၁ |
Panasonic 350 ဂဟေစက် နှစ်လုံး အပါအဝင်
|

|
| ၉ |
ဟော့ပါစုဆောင်းခြင်း
|
သတ်မှတ်ပါ | ၂ |
-
|

|
| ၁၀ |
လက်စွပ်လုပ်စက်မှိုများ
|
သတ်မှတ်ပါ | ၁ |
-
|
|
| ၁၁ |
အမြန်ပြောင်းလဲနိုင်သော ပလိတ်
|
သတ်မှတ်ပါ | ၁ |
အချင်း ၃၉ မီလီမီတာရှိသော ခွဲထားသော ကျောက်ဆူးဘို့အတွက်
|
|
| ၁၂ |
အမြန်ပြောင်းလဲနိုင်သော ပလိတ်
|
သတ်မှတ်ပါ | ၁ |
အချင်း ၄၀ မီလီမီတာရှိသော ခွဲထားသော ကျောက်ဆူးဘို့အတွက်
|
|
| ၁၃ |
အမြန်ပြောင်းလဲနိုင်သော ပလိတ်
|
သတ်မှတ်ပါ
|
၁ |
အချင်း ၄၃ မီလီမီတာရှိသော ခွဲထားသော ကျောက်ဆူးဘို့အတွက်
|
|
| ၁၄ |
အမြန်ပြောင်းလဲနိုင်သော ပလိတ်
|
သတ်မှတ်ပါ
|
၁ |
အချင်း ၄၄ မီလီမီတာရှိသော ခွဲထားသော ကျောက်ဆူးဘို့အတွက်
|
|
| ၁၅ |
အမြန်ပြောင်းလဲနိုင်သော ပလိတ်
|
သတ်မှတ်ပါ
|
၁ |
အချင်း ၄၇ မီလီမီတာရှိသော ခွဲထားသော ကျောက်ဆူးဘို့အတွက်
|
|
| ၁၆ |
ရွေးချယ်နိုင်သော Semi-automatic လက်စွပ်ပြုလုပ်စက်
|
သတ်မှတ်ပါ
|
၁ |
သံမဏိဘား decoiler အပါအဝင်
|

|
| ၁၇ |
တစ်ပိုင်းအလိုအလျောက် လက်စွပ်ဂဟေဆက်စက် (တစ်နေရာတည်းသုံး)
|
သတ်မှတ်ပါ
|
၁ |
၁၁၃၀၀၀; Panasonic 350 ဂဟေစက်တစ်လုံး အပါအဝင်
|

|
| ၁၈ |
ကျောက်ဆူးဘော့ အပေါ်ပိုင်းဖြတ်စက်
|
ပီစီများ | ၁ |
T-အမျိုးအစား
|
|
| ၁၉ |
ကျောက်ဆူးဘော့ အောက်ပိုင်းဖြတ်စက်
|
ပီစီများ | ၁ |
-
|
|












